
Author: Yu Shioji (塩地 優) ※当サイト内の論文・解説等は、すべて著者個人がデータ収集、解析、考察を行ったもので、いかなる文言も当会を代表するものではありません。 Article type: Review(解説) Article number: 240015
富士急ハイランドの ええじゃないか は、現状世界に3機しかない、制御型4次元コースターの1つです。そのメカニズムは、かねてから「ラックアンドピニオン」であるとして紹介されてきました。ここでは、そのメカニズムに基づいて、座席回転とエレメント配置が現在の形になっている理由を、Arrow Dynamics社による特許[1]を解読しながら追っていきます。
特許の背景
ええじゃないかは、世界に3機しかない、制御型4次元コースターの1つです。4次元コースターというのは、ローラーコースターのレールとは別に、座席だけが回転できる機構を持ったコースター。その座席回転が、コースレイアウトに合わせて制御されているものが制御型4次元コースターです。常時制御されてはいないものの場合、フリースピンと呼ばれます。
制御型4次元コースターの1号機は、Six Flags Magic MountainにあるX(現X2)です。開発したのは、Arrow Dynamics社。ただし、その複雑な機構から当初は調整が続き、膨大な開発費がのしかかってArrow社は倒産します。その後、S&S社が事業を引き受け、ええじゃないかはS&S社による1号機として作られることになります。その後、中国にS&S社2号機、通算3号機目が作られます。
その間に微修正が入り続け、これら3機は車輪周りの構造がすべて微妙に異なるという、異質な進化を遂げることになりますが、座席の回転機構はいずれも同じだと思われます。ですから、ここではArrow社時代に開発を主導した、Alan Schlike氏らによる特許[1]をベースに機構の解析をしていきます。
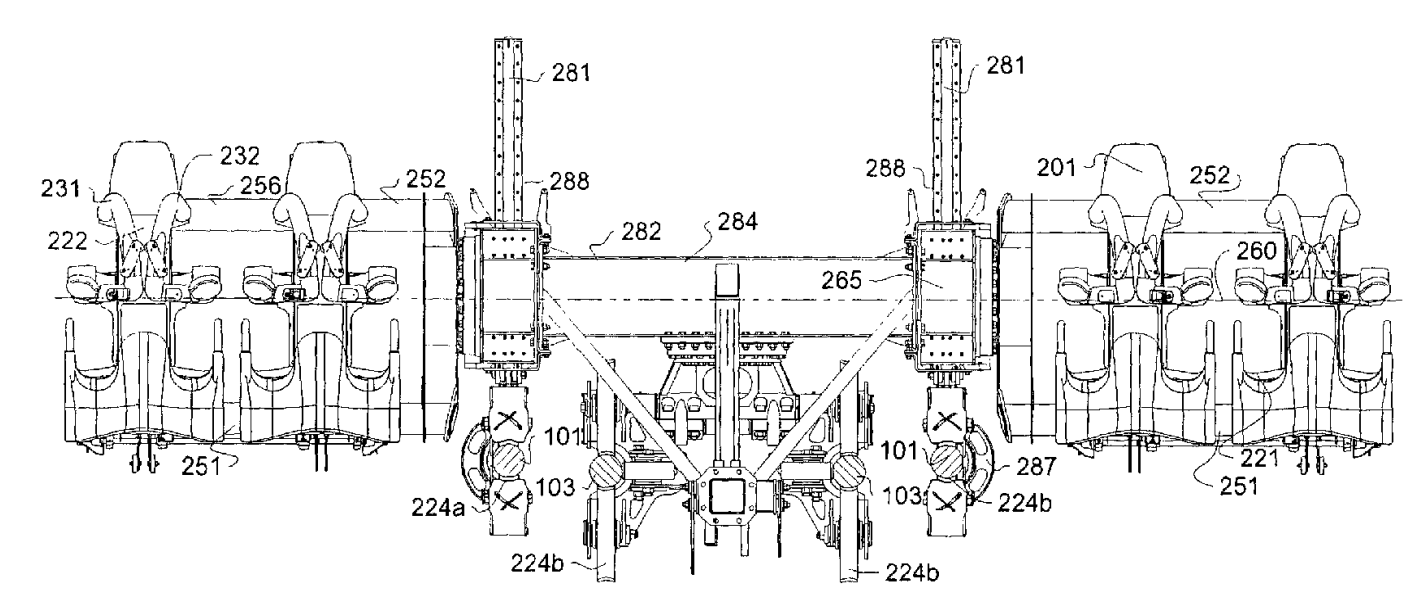
この特許では、明らかにXの設計図面と思しき図が複数掲載されています。後にご紹介します、「Xレール」と呼ばれる外側のレールを走る車輪のカウルには、「X」のロゴが刻まれています。このため、この特許を紐解くことで、ええじゃないかの動作原理もわかると考えられます。
[1]より。
余談ですが、Alan Schilke氏は、後にS&S社において磁石制御機構を取り入れたフリースピン型4次元コースター(日本には、ナガシマスパーランドの嵐があります)の開発にも関与します[2]。
ラックアンドピニオンによる回転制御
ええじゃないかの座席回転の基本的な機構は、ラックアンドピニオンです。ラックアンドピニオンの詳細は、例えばwikipedia[3]をご覧いただくとして、ここでは簡単にご説明します。
まず、ええじゃないかのレールには、2本のメインレールの他に、その外側にXレールと呼ばれる別のレールがあります(図1)。メインレール2本、Xレール2本で、合計4本のレールがあることになります。

図1 メインレールとXレールの位置関係
車体が走行する位置を決める主輪や側車輪、底輪などはメインレールを走行します。なお、ええじゃないかは座席が回転するため、車体の「上下」という概念があまりハッキリしていません。このため、主輪と底輪は同じサイズになっています。
一方、Xレールには上下に車輪があって、そこからギザギザのついた棒状のものが車体を貫通しています(図2)。これは歯車を直線状にしたようなもので、「ラック」と呼ばれます。

図2 Xレールを走行するラックが付いた車輪。Xレールを走行する車輪の上に、かろうじてラックのギザギザが見えるかと思います。
このXレールが、メインレールに対して上下することによって、ラックが上下動します。その上下動を受けて、車体内に組み込まれた歯車(ピニオン)が回転し、座席が回転するという仕組みです。これが、ええじゃないかの座席回転の基本的なメカニズムです。
座席の回転範囲
続いて、座席の回転範囲を明らかにしていきます。特許[1]中には、回転範囲は720度が最適だとわかっている、と記載されていますが、実際にはそうなっていません。
回転範囲の解析のため、プラットフォームでの座席位置、つまり進行方向後ろ側を向いて、背もたれが立っている状態を0度とします。ここから背面側に倒れる場合を+方向、前方に回転する場合を-方向と定義しましょう。
出発直後、一度150度ほど+方向に回転し、巻き上げ前に回転角は90度まで戻ります。巻き上げが終了すると、小さいディップで速度を上げながらファーストドロップに向かいます。ファーストドロップでは、座席が‐180度まで回転し、真下を向いて落下していきます。ドロップ途中で座席はさらに‐90度回転し、頭が進行方向を向く‐270度の状態でインサイドレイヴンターンへと向かいます。
インサイドレイヴンターンの頂上付近では、1回転半、+540度回転し、座席は+270度の状態、つまり足を進行方向に向けた状態で落下していきます。続いて、フルツイスティング・フルフロントフリップで前方に-360度回転、座席は-90度の状態になります。そのままの姿勢でターンを通過後、ハーフツイスティング・ハーフバックフリップで+180度回転、座席は+90度で頭を進行方向に向けた状態になります。続くアウトサイドレイヴンターンでは前方に-180度回転、‐90度の状態に。再びハーフツイスティング・ハーフバックフリップで+180度回転して+90度の状態になった後、大きく前方に‐150度ほど振って、再度0度の状態に戻ります。
これでわかったのは、ええじゃないかの座席の回転範囲は、+270度から‐270度までの540度である、ということ。しかも、インサイドレイヴンターンでその全域を使った回転をしています。
なお、ええじゃないかの前の世代であるX2は、‐270度~90度までの360度が可動範囲です。いずれの場合であっても、特許に記載された720度という回転範囲は使っていないことがわかります。
なぜ、回転範囲は設計時に絞られたのでしょうか。コースレイアウト的に必要なかった、ということも考えられますが、振動面の懸念もあったのではないかと考えます。Xレールは、メインレールを支えるU字型のサポートの外側に取り付けられています。そのU字型サポートの高さがおそらく80 cm程度。そのうち60 cm程度の幅を使ってXレールを上下させていて、その範囲で、ええじゃないかの場合は540度の回転を実現します(実際には540度ではないことを後述しますが、ここでは540度としておきます)。なお、寸法はインチでの設計ではないかと思いますので、細かな数値は異なる可能性があります。
60 cmで540度回転するということは、10 cmあたりの回転角が90度です。レール位置の公差が±1 mmであったとすると、メインレールとXレールで、その相対位置には最大±2 mmのズレが発生します。4 mmの振動というと、大したことがないように感じられるかもしれませんが、角度に直すと3.6度です。目で見てわかるレベルで座席が振動することになります。通常の走行時の振動に加えて、座席が前後に振られるわけですから、乗り心地が不快になってしまうことは、想像に難くありません。
このため、もともとX2では回転角を360度に制限したのではないでしょうか。上記の通り公差が±1 mmであったとしても、振動角が2.4度に抑制されます。逆に回転角を720度にすると、同じ公差で振動角は4.8度に広がってしまいます。
ええじゃないかはどのようにして回転範囲を拡大したのか
では、同じ仕組みを使っているはずの、ええじゃないかとX2で回転範囲が異なるのは、なぜなのでしょうか。ええじゃないかのレール施工はS&Sではなく、サノヤス・ヒシノ明昌(現サノヤス・ライド)ですので、その施工技術の差が影響している可能性がありますが、実はもう少しシンプルな解があると思われます。
先ほど、ええじゃないかのXレールの、メインレールに対する相対可動域は60 cmであると述べましたが、実際には可動域が60 cmよりも広いのです。何を言っているのかと言いますと、図3をご覧ください。車輪の直径が40 cmくらいだとすると、Xレールはメインレールより、60 cmほど下にいるのがお分かりいただけるかと思います。

図3 ええじゃないかのファーストドロップ上方。メインレールとXレールの距離は、推定60 cmほど。
この画像を目に焼き付けたまま、図4をご覧ください。

図4 ええじゃないかのファーストドロップ下部。U字型のサポートが高くなっています。
目を凝らしてご覧いただくと、メインレールを支えるU字型(カタカナのコの形と言った方が正しいかもしれません)のサポート部材の足が長くなっているのがお分かりいただけるかと思います。こうして、メインレールを高くすることで、Xレールの相対高さを低くしているのです。この点は、しおるてさんにご教示いただきました。
B級えじゃリストから解説させて頂くと、ええじゃないかの回転制御に必要なのは「サブレールの上下」ではなく「サブレール・メインレールの間隔の変化」であって、メインレールの高さを変化させることでも回転制御は可能なわけですね。
で、よく見ると場所によりメインレールの高さが異なる。 https://t.co/gP6ceismxH pic.twitter.com/yglUN96YTS— しおるて (@shiolutef_bot) March 4, 2024
これによって、X2に対して90度分の可動範囲を追加で得ていることになります。このU字型サポートの高さ変化が必要なのは、ファーストドロップ下部~インサイドレイヴンターン上部にかけてです。このため、インサイドレイヴンターン上部でサポートの高さは戻していると思われます(図5。真横から撮影できないため、確証はありません)。

図5 インサイドレイヴンターン上部。車両の右手側ではU字型サポートが高く、左手側では低くなっていると思われます。
では、なぜU字型サポートを常時高くしておかないのでしょうか。こうした部材は、同じサイズのものを多数用いたほうが、量産効果が高まり、コストを低減できそうです。あえてそうしないのは、強度の問題ではないかと思われます。足を長くすると、レールに横方向の力がかかった時に、サポートの90度曲がっている部分にかかる応力が大きくなります。モーメントが大きくなり、応力が集中する箇所に力がかかりすぎて、破断しかねない。ですから、横方向に力がかかる部分では、U字型サポートの足を長くできないのだと思われます。幸い、ファーストドロップからインサイドレイヴンターンにかけては直線で、左右方向に大きな力がかかりません。このため、この領域だけはサポートの足を長くすることができるのです。
これは、回転制御上大きな制約になります。‐270度~‐180度の角度範囲は、ファーストドロップ部以外では使えないのです。X2に対して、サポートの足の長さ変更という離れ業を使ってまで稼いだ90度は、ワンポイントでしか使えない飛び道具になってしまっています。
さて、これで90度分の角度の稼ぎ方はわかりましたが、X2とええじゃないかの角度範囲の差は180度です。残り90度も稼がなければなりません。どうしたかと言いますと、図6をよくご覧いただきますと、Xレールがメインレールよりも高い位置にあることがお分かりいただけるかと思います。

図6 フルツイスティング・フルフロントフリップの直前。Xレールがメインレールよりも高い位置にあります。
X2では、メインレールとXレールがちょうど同じ高さになるまでの範囲しか使われていませんので、ええじゃないかの方が、高い側も可動範囲が大きいことになります。これによって、+側の90度も稼いでいるわけです。
こうして、2つの工夫によって、ええじゃないかはX2に対して、180度の追加回転範囲を得ました。ただし、ラックアンドピニオンのピッチを変更するのではなく、Xレールの可動範囲を拡大することで、追加の回転範囲を得ていることから、振動の観点でピッチ変更は難しいことがわかります。また、既にXレールの可動範囲は、明らかに限界を迎えていますので、これ以上の回転範囲拡大は難しい、ええじゃないかが限界である、ということがわかります。
ちなみに、現在のええじゃないかは、Xレールに由来する振動対策として、ラックと車輪とを、ゴムのロッド4本を介して接続しています(図7)。
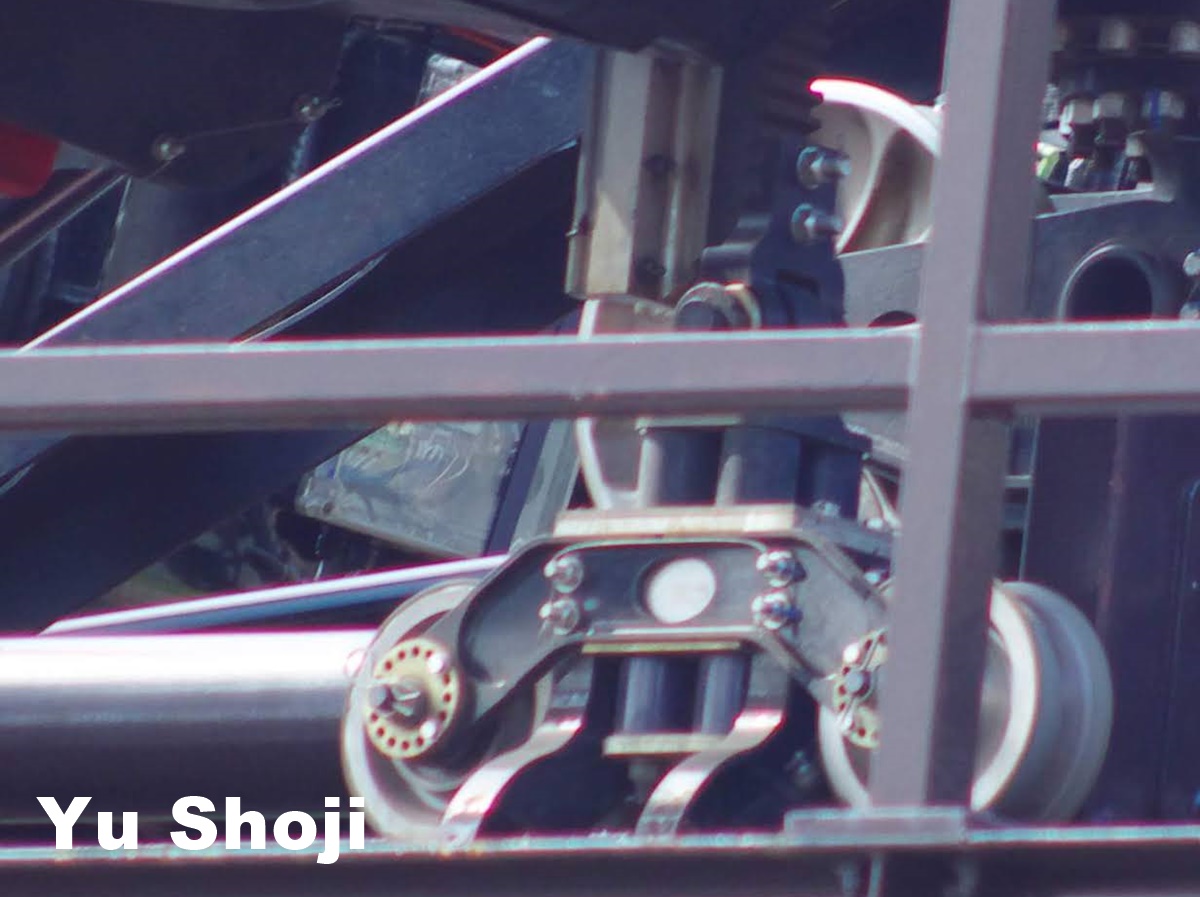
図7 Xレールを走行する車輪の拡大図。ラック部とは、ゴムロッド4本を介して接続されていることがわかります。
旧車両では、上下の車輪間をダンパーで接続し、車輪とラックの間にゴム板を挟む形で振動抑制をしていましたので、ここの形式が大きく変わっています。余談ですが、Xやええじゃないかは、コース変更なくボギー台車からアッカーマンタイプの台車に変更した、数少ないコースターの1つです。
Xレールを走る車輪は、どのようにレールに追随しているのか
ここで話は変わります。
通常、ローラーコースターの車輪は、車体とは独立に水平・垂直の2軸で回転できるようになっています。これは、車体は前方車両との連結部に向かいますが、車輪はそれとは独立にレールに沿っていなければならないためです。

一方で、Xレールを走行する車輪については、車体の向きを制御するために用いるものではありませんので、レールの向きに追随する必要がありません。当然、上下方向については、レールにきちんと追随する必要がありますが、左右方向は無視できるのです。左右を無視することで、側車輪を省くことができたり、可動軸を1つ減らすことができたりと、構造上のメリットが多数あります。ただし、カーブにおいて車輪の向きがレールに沿わないため、車輪には、広い幅で平坦な領域を用意する必要が出てきます。
そうした観点で再度図7をご覧いただきますと、脱輪を防止するフリンジが両サイドにあって、その中央部は平坦になっている、あまり見かけない形をしていることがお分かりになるかと思います。通常、凹型の車輪というのは、全体が曲面で構成されるのですが、ええじゃないかの場合には平坦部が作られています。これによって、カーブにおける車体とレールの向きのズレに対応しているものと思われます。
参考文献
[1] WO 03/022382 “AMUSEMENT RIDES AND METHODS.”
[2] US 201314080606 “System and apparatus for magnetic spin control for track-mounted vehicles.”
[3] wikipedia “ラック・アンド・ピニオン” https://ja.wikipedia.org/wiki/%E3%83%A9%E3%83%83%E3%82%AF%E3%83%BB%E3%82%A2%E3%83%B3%E3%83%89%E3%83%BB%E3%83%94%E3%83%8B%E3%82%AA%E3%83%B3 (2024年3月21日閲覧)
引用方法
引用時は、下記を明記してください。
Yu Shioji, J. Amusement Park (2024) 240015.
利益相反
本稿に関わる利益相反はありません。

コメント